8 decembrie 2023
Luca Carlone, MIT
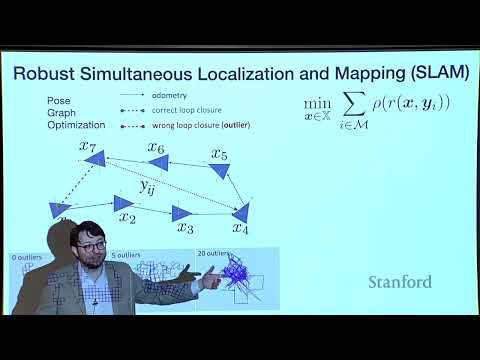
Un decalaj mare încă separă percepția robotului de cea umană: oamenii sunt capabili să formeze rapid o reprezentare holistică a scenei care să cuprindă atât aspecte geometrice, cât și semantice, sunt robuste la o gamă largă de condiții perceptive și sunt capabili să învețe fără supraveghere la nivel scăzut. . Această discuție discută eforturile recente de a reduce aceste lacune. În primul rând, arătăm că înțelegerea scalabilă a scenei metrice-semantice necesită reprezentări ierarhice; aceste reprezentări ierarhice, sau grafice de scenă 3D, sunt cheia pentru stocarea și inferența eficiente și permit algoritmi de percepție în timp real. În al doilea rând, discutăm progresul în proiectarea algoritmilor certificabili pentru estimarea robustă, care oferă garanții de performanță de prim rang pentru problemele de estimare care apar în percepția robotului. În cele din urmă, observăm că certificarea și auto-supravegherea sunt provocări duble, iar proiectarea algoritmilor de percepție certificabili permite o schemă naturală de învățare auto-supravegheată; aplicăm această perspectivă la estimarea poziției obiectelor 3D și prezentăm algoritmi auto-supravegheați care funcționează la egalitate cu metodele de ultimă generație, complet supravegheate, fără a necesita în același timp adnotări 3D manuale.
Cursuri interesante:
- Seminar Stanford – Autonomie robotică bogată în percepție cu modele de mediu neuronal
- 10. Faptele Apostolilor
- Stanford CS25: V1 I Transformers in Vision: abordarea problemelor în Computer Vision
- Seminar Stanford – Control sigur și robust bazat pe percepție
- Seminar Stanford – Obiecte neuronale multi-senzoriale: modelare, inferență și aplicații în robotică
- 9. Evanghelia după Luca
- 23. Structuri sociale
- Seminar Stanford – Algoritmi de robotică care iau în considerare oamenii
- Seminar Stanford – Manipulare robotică adaptabilă folosind senzori tactili
- Cursul 8: Privatizarea Guvernului I: Utilități, Domeniu Eminent și Administrație Locală